
近日,南方科技大学自动化与智能制造学院岳天奇副教授与英国布里斯托大学合作,开发了一种具有自主智能与多模态感知能力的软体机器人系统。该研究受到章鱼吸盘及其神经肌肉层级结构的启发,首次将吸附、感知与智能控制三大功能整合于单一流体架构中,且无需依赖复杂的电子控制系统,为软体机器人控制提供了“具身智能”的新范式。相关论文以《Embodying soft robots with octopus-inspired hierarchical suction intelligence》为题,发布在机器人领域顶级期刊《Science Robotics》上,并被选为期刊当期封面。
图1:Science Robotics 2025年5月封面

图2:相关文章
传统机器人系统通常依赖复杂的结构和集中式计算机进行虚拟运算,而该研究致力于以最简单的结构完成中等复杂度的任务。研究团队模仿了章鱼吸盘的分层神经调控系统,将机械结构与物理世界的自发交互行为相结合,模拟出“下意识”的自主动作和控制,这一策略显著降低了系统的计算资源需求与成本。
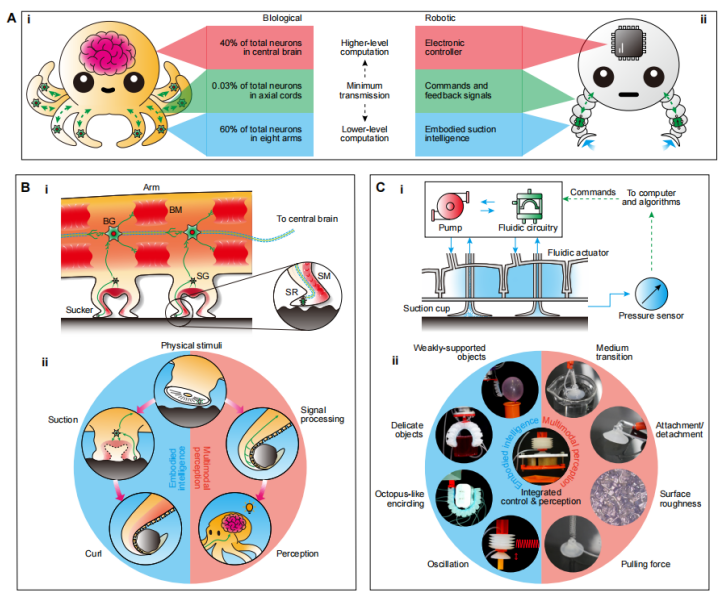
图3:仿章鱼软体机器人具身智能系统的实现
该系统的核心在于吸盘集成的流体开关结构以及吸盘与环境间的流体交互性质,它能根据物理接触自发触发动作调控,同时解析一维气压信号,实现高效、灵活的抓取与环境感知。实验表明,该系统能够轻柔地抓握脆弱的气球而不使其破裂,四指软体手也能稳定抓取无壳鸡蛋和果冻等易损物品。在执行驱动与抓握任务时,系统还能在线解析并感知物体的重量、表面粗糙度及干湿状态等,展现出强大的多模态感知能力。
该研究具有广泛的实际应用前景,包括工业自动化、安全人机交互、植入式医疗设备以及农业自动化采摘等多个领域。目前,岳天奇课题组正致力于将真空吸附机制拓展至人形机器人本体结构设计中,有望为人形机器人提供新的构型设计范式,替代传统的关节设计方式,全面提升机器人的运动效率和行为流畅度。
论文链接:https://www.science.org/doi/10.1126/scirobotics.adr4264